

控制系统的第一代产生于1930年到1940年,主要代表是以基地式仪表为代表的机械控制技术。第二代产生于1950年,主要是电气控制技术为主的继电器控制技术和调节器为代表的模拟控制技术。目前所称的控制系统是第三代控制系统,诞生于二十世纪七十年代,主要技术代表是用于流程工业的集散控制系统(DCS)和用于离散工业的可编程控制器(PLC)。
为了正确理解控制系统,今天为大家科普一些关于控制系统的专业术语。
1 闭环控制
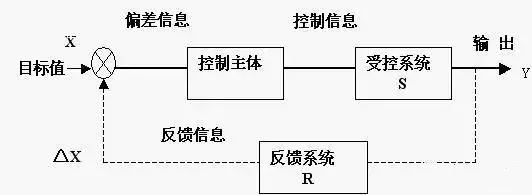
相对于开环控制而言,闭环控是指控制论的一个基本概念。指作为被控的输出以一定方式返回到作为控制的输入端,并对输入端施加控制影响的一种控制关系。在控制论中,闭环通常指输出端通过“旁链”方式回馈到输入,输出端回馈到输入端并参与对输出端再控制,这才是闭环控制的目的,这种目的是通过反馈来实现的。
2 I/O点
在讨论控制系统的时候,I/O点是最经常听到的一个术语。它是指输入/输出点,I代表INPUT,指输入,O代表OUTPUT,指输出。输入/输出都是针对控制系统而言,输入指从仪表进入控制系统的测量参数,输出指从控制系统输出到执行机构的参量,一个参量叫做一个点。一个控制系统的规模有时按照它最大能够控制的I/O点的数量来定。
3 模拟量和开关量
在控制系统中,另一个常见的术语就是模拟量和开关量。不论输入还是输出,一个参数要么是模拟量,要么是开关量。模拟量指控制系统量的大小是一个在一定范围内变化的连续数值,比如温度从0-100度、压力从0-10MPA、液位从1-5米、电动阀门的开度从0-100%等等,这些量都是模拟量。而开关量指该物理量只有两种状态,如开关的导通和断开的状态,继电器的闭合和打开,电磁阀的通和断等等。
对控制系统来说,由于CPU是二进制的,数据的每位有“0”和“1”两种状态,因此开关量只要用CPU内部的一位即可表示,比如用“0”表示开,用“1”表示关。而模拟量则根据精度,通常需要8位到16位才能表示一个模拟量。最常见的模拟量是12位的,即精度为2-12,最高精度约为万分之二点五。当然,在实际的控制系统中,模拟量的精度还要受模拟/数字转换器和仪表的精度限制,通常不可能达到这么高。
4 控制回路
控制回路通常是针对模拟量的控制来说,一个控制器根据一个输入量,按照一定的规则和算法来决定一个输出量,这样输入和输出就形成一个控制回路。控制回路有开环和闭环的区别。开环控制回路,指输出是根据一个参考量而定,输入和输出量没有直接的关系。而闭环回路则将控制回路的输出再反馈回来作为回路的输入,与该量的设定值或应该的输出值作比较。闭环回路控制又叫反馈控制,是控制系统中最常见的控制方式。下面介绍几种常规的反馈控制的模式:
二位控制
这是最简单的反馈控制,有时也叫开关控制。这种控制是当被测量达到最高值或最低值的时候,就给出一个开关的信号。虽然被测量可能是模拟量,但控制输出是开关的,所以叫两位控制。在工业现场,有许多温控器和液位开关控制是采用这种方式的。
比例控制
控制器的输出值与被控参数的测量值和设定值或某个参考点的偏差是一个比例关系。比例控制比二位控制要平滑一些,消除了二位控制时会产生的被控量上下振荡的情形。比如,对一个反应罐的液位,如果设定的液位值是2700毫米,当液位降低时,进料管道上的阀门就要增加开度,而液位偏高时,则要将开度减小。增加和减小的比例与液位和设定值的偏差大小成比例关系。
积分控制
在积分控制中,被控变量值的变化与控制系统输出控制到实际生效的时间有一个预先设定的关系。执行机构的输出是渐渐地达到设定的值的。这种控制方式的产生是由于实际的控制元件和执行机构从给出输出信号到使被控变量达到设定值往往需要一段时间。
最常见的例子是温度控制,比如,假定我们知道到煤气阀门的开度到60%的时候,热水器的水温能够达到适宜洗澡的45度,但是当你把阀门一下子拧到60%的位置时,水依然是凉的,你必须等到水温升到45度左右的时候就会稳定。如果控制系统不用积分控制,而只用比例控制,那么当阀门输出为60%时,这时输入的温度值可能依然只有20度,那么按照比例控制,既然偏差依然存在则阀门的开度会继续加大,这样当水温升到45度时,阀门的开度可能会达到90%甚至更高,这时虽然控制系统会通知阀门保持不动,但水温会继续升高,可能到了50度甚至60度。这时阀门的开度会减小,但在减小到60%之前,水温都会继续上升,当阀门开度减到60%时,水温依然可能是70度,一直到阀门的开度变成20%时,水温才会变成45度,这时阀门运动会停止,但水温却会继续下降,直到变成凉水。如果这时是冬天,可能你的情形还要糟糕,这就是没有积分控制的温度控制器会发生的情况。
微分控制
微分控制通常与比例和积分控制同时使用,由于积分控制有滞后,微分控制可以让控制对偏差的反应提前,以免控制系统的反应过于迟钝。微分控制与比例和积分控制同时使用,可以使被控状态更迅速地达到稳定状态,而又不会出现上文出现的振荡现象。
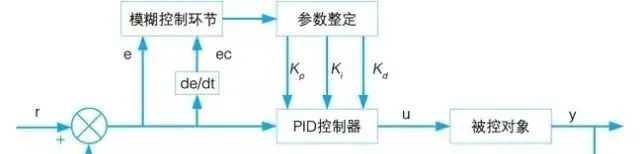
PID控制
在实际的控制系统中,根据实际变量的情况,上述三种控制方式有时只有一种,有时是两种,有时三种同时采用。比例控制用P表示,积分控制用I表示,微分控制用D表示,根据采用的方式,分别称为P控制,PI控制,PID控制。其中,PID控制是控制系统最常见的控制模式。
延时控制
通常应用在开关量控制的场合,当一个开关状态变化时(比如由开变关时),控制器的输出动作要延时一段时间才会给出。比如,在生产线常用的接近开关,当工件就位时,接近开关给出信号,下一个滚筒由于和接近开关安装的位置有一段距离,所以通常要延迟几秒才开始滚动。
连锁控制
常用于开关控制的场合,比如有三个开关,A、B和C,C开关必须在A和B同时打开的时候才能够打开;或者当A打开时,C必须打开;这种关系就是连锁控制。在工业现场中,尤其是在涉及安全控制的场合,连锁控制方式是很常见的。比如反应釜中的放散阀,当压力达到一定值时,压力开关的信号发生变化,则放散阀门必须立刻打开。
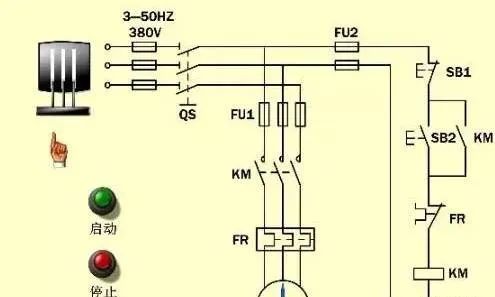
电动控制
指控制系统的输出是通过电气量或电子信号来进行的,所控制的对象是电动执行元件,比如继电器、步进开关、电磁阀、伺服驱动器和变频器等等,绝大部分的自动控制多多少少都会有电动控制元件。
液压控制
在机器与设备的操作中,许多控制是用液压控制机构来进行的。在连续速度控制的场合,液压控制通常比较方便和便宜,当能量转换效率较高的时候,液压控制往往和电动控制中的伺服控制同时使用。这时,就形成了效率和精度较高的电液执行机构。
气动控制
有三种情形用到气动执行机构:1、运动的线路上有标准的单向气动阀门组合来完成控制逻辑功能;
2、在气体管道中采用一些没有移动部件的元件,这些元件是依靠流过的气体特性而进行开关动作的;
3、运动的逻辑控制系统,采用模块化的内置隔膜、绕线或套筒式。这三种气动元件都是采用压缩空气作为传输信号或执行机制的动力。在工厂中,由于压缩空气容易获得,干净、无污染,又安全,控制的功能和设计都十分简单,因此现在许多生产线上采用气动工具。
5 插补
插补(Interpolation),即机床数控系统依照一定方法确定刀具运动轨迹的过程。也可以说,已知曲线上的某些数据,按照某种算法计算已知点之间的中间点的方法,也称为“数据点的密化”;数控装置根据输入的零件程序的信息,将程序段所描述的曲线的起点、终点之间的空间进行数据密化,从而形成要求的轮廓轨迹,这种“数据密化”机能就称为“插补”。
6 位置环、加速环和电流环
所谓环的概念,是加入了反馈到处理环节,来提高应用系统的稳定性和性能。
控制电流的目的,还是为了控制电压,电压传输过程中会有损耗、压降、燥音,我们用电流传输信号来控制所需电压。
速度和位置的关系: 路程=速度×时间,延伸连续变化的速度在一个时间段的积分,就是这段时间的路程(位置)。
速度和电流的关系:速度=加速度×时间,加速度取决给定电流,延伸连续变化的加速度在一个时间段的积分,就是即时的速度。
转矩控制模式,就是让伺服电机按给定的转矩进行旋转,就是保持电机电流环的输出恒定。如果外部负载转矩大于或等于电机设定的输出转矩则电机的输出转矩会保持在设定转矩不变,电机会跟随负载来运动。如果外部负载转矩小于电机设定的输出转矩则电机会一直加速直到超出电机或驱动的最大允许转速后报警停止。
速度模式下就是电机速度设定和电机上所带编码器的速度反馈形成闭环控制。以伺服电机实际速度和设定速度一致。速度环的控制输出就是转矩模式下的电流环的力矩给定。位置控制模式是上位机给到电机的设定位置和电机本身的编码器位置反馈信号或者设备本身的直接位置测量反馈。
进行比较形成位置环,以保证伺服电机运动到设定的位置。位置环的输出给到速度环作为速度环的设定。所以说,转矩控制模式是利用了伺服电机控制最基层的电流控制环,速度控制环是建立在电流环之上的,位置控制环又是建立在速度环之上的。
 Copyright © 2005-2021 网信安全世界版权所有
Copyright © 2005-2021 网信安全世界版权所有